Ведущий микроконтроллер
Когда говорят ?ведущий микроконтроллер?, многие сразу представляют себе самый мощный, самый новый чип с максимальным набором периферии. Но на практике, особенно в промышленной автоматизации, это часто оказывается не самым дорогим или ?топовым? решением, а тем, который реально ведет проект — задает архитектуру, определяет надежность всей системы и, что важно, позволяет уложиться в сроки и бюджет. Слишком часто видел, как команды выбирали ?монстра? с гигагерцами и мегабайтами памяти, а потом месяцами мучились с его энергопотреблением или отсутствием нужного таймера. Вот этот разрыв между бумажными характеристиками и реальной жизнью на объекте — самое интересное.
Что на самом деле значит ?ведущий? в контексте проекта?
Здесь нужно разделять две вещи. Первое — техническое лидерство: ядро, частота, вычислительная мощность. Это важно для задач типа ПЛК или сложных регуляторов. Второе, и часто более критичное — системное лидерство. Этот микроконтроллер становится центральным узлом, к которому привязаны все остальные компоненты: драйверы, интерфейсы связи, система питания. Если он ?болеет?, болеет вся линия. Например, в одном проекте по модернизации сушильной камеры мы изначально взяли STM32H7 — мощно, с запасом. Но столкнулись с тем, что для работы с устаревшим протоколом Modbus RTU через RS-485 пришлось городить костыли с таймерами, потому что все USART были заняты под более скоростные каналы. Ведущий-то он ведущий, но не для этой конкретной связки железа и софта.
Поэтому мой критерий сместился в сторону ?экосистемы? и предсказуемости. Часто надежнее взять менее производительный, но хорошо знакомый коллективу и проверенный в похожих условиях ведущий микроконтроллер. Скажем, серия STM32F4 или даже F1 для многих задач управления электроприводами до сих пор более чем адекватна. Экономия идет не на цене чипа, а на времени отладки и снижении рисков. Китайские коллеги из ООО Шицзячжуан Чжунчжичуансинь Технологии (сайт — https://www.zzcxkj.ru), которые занимаются в том числе интеграцией систем и продажей промышленных контроллеров, наверняка сталкиваются с подобными дилеммами при подборе решений для клиентов. Их сфера — технический обмен и передача технологий — как раз про поиск такого баланса.
И еще один нюанс — ремонтопригодность и долгосрочная доступность. Выбрал ты в 2022 году в качестве ведущего какой-нибудь модный микроконтроллер с AI-ускорителем, а в 2024-м его сняли с производства или он ушел в allocation. И вся твоя аппаратная платформа, вся логика проекта — под угрозой. Приходится думать на два шага вперед, иногда жертвуя ?свежестью? ради стабильности поставок. Это особенно актуально для серийного производства, где перекладка платы — это огромные затраты.
Практические ловушки при интеграции: от железа до софта
Одна из ключевых проблем, которую часто недооценивают на этапе архитектурного выбора — согласование уровней напряжения и нагрузочной способности линий ввода-вывода. Кажется, что в даташите все есть: 3.3В, несколько мА. Но когда к этому ведущему микроконтроллеру начинаешь цеплять датчики с токовой петлей 4-20 мА, или энкодеры с длинными кабелями, или релейные модули с катушками — начинается ад. Проблемы с помехоустойчивостью, просадки питания, необходимость в буферах и драйверах. Это увеличивает и стоимость, и сложность платы.
Другая частая история — распределение прерываний. Вроде бы, у современного контроллера их десятки. Но попробуй организовать одновременную работу высокоскоростного АЦП для съема сигналов, обработку данных с нескольких UART (скажем, для связи с HMI и другим контроллером) и точную генерацию ШИМ для управления инвертором. Очень быстро понимаешь, что приоритеты прерываний и время их обработки становятся критичным фактором. Иногда проще и дешевле поставить второй, вспомогательный микроконтроллер, который возьмет на себя рутинные или временно-критические задачи, разгрузив ведущий. Это тоже часть архитектурного решения.
И, конечно, инструментарий. Поддержка в популярных средах вроде Keil, IAR, или возможность работы с открытыми тулчейнами (GCC, OpenOCD). Наличие качественных HAL-библиотек от производителя или активного комьюнити. Бывало, что отказывался от вроде бы подходящего по параметрам чипа только потому, что для него не было нормального драйвера для нужного интерфейса (например, EtherCAT или CAN FD), или его отладка требовала дорогого и редкого программатора. Время инженера — тоже деньги.
Кейс: неудача, которая многому научила
Хочется привести пример из личного опыта, где выбор ведущего микроконтроллера был сделан, на мой взгляд, ошибочно. Задача была — разработать контроллер для испытательного стенда гидравлических приводов. Нужно было управлять сервоклапанами (высокочастотный ШИМ), снимать данные с множества датчиков давления и расхода (через АЦП и SPI), вести лог в SD-карту и общаться с верхним уровнем по Ethernet. Выбрали микроконтроллер с двумя ядрами Cortex-M7 и M4, с аппаратным ускорителем FPU и гигабитным ETH MAC. В теории — идеально.
На практике же возникли проблемы, которых не ожидали. Во-первых, сложность синхронизации двух ядер для обмена данными в реальном времени. Потратили уйму времени на отладку IPC (Inter-Processor Communication). Во-вторых, выяснилось, что драйвер Ethernet-стека от производителя в связке с нашей RTOS создавал необъяснимые задержки в моменты высокой сетевой нагрузки, что сказывалось на стабильности ШИМ. В-третьих, энергопотребление в режиме ожидания оказалось выше расчетного, что потребовало переделки схемы питания.
В итоге проект сдали с задержкой, переплатив за ?мощность?, которая в полной мере не была использована, а главное — не решила ключевые проблемы надежности. Рефлексия после этого привела к простому выводу: для следующего похожего проекта взяли бы два более простых, но отлаженных однокристальных решения, связанных по CAN FD. Один отвечал бы за критичные по времени задачи управления (ШИМ, АЦП), второй — за связь, логирование и интерфейс. Надежность системы в целом была бы выше, а разработка — предсказуемее. Это к вопросу о том, что ?ведущий? не всегда означает ?единственный?.
Роль поставщиков и интеграторов в выборе
Здесь стоит отметить, что самостоятельный подбор компонентов — не всегда оптимальный путь для инжиниринговой компании. Часто эффективнее работать с партнерами, которые специализируются на поставках и технической поддержке полных решений. Вот, к примеру, компания ООО Шицзячжуан Чжунчжичуансинь Технологии. Судя по описанию на их сайте https://www.zzcxkj.ru, они как раз покрывают весь цикл: от проектирования интегральных схем и разработки софта до продажи промышленных управляющих компьютеров и интеграции систем. Для них выбор ведущего микроконтроллера — не абстрактная задача, а ежедневная практика, тесно связанная с конкретными заказами клиентов из области механического оборудования или электромеханической сборки.
Такой интегратор может предложить не просто чип, а отлаженный модуль (System-on-Module), базовую software-платформу, драйверы и даже готовые библиотеки для типовых функций. Это резко сокращает time-to-market. Их экспертиза в подборе силовых электронных компонентов и коммуникационного оборудования, указанная в сфере деятельности, напрямую связана с тем, как выбранный микроконтроллер будет взаимодействовать с ?внешним миром?. Они, скорее всего, уже набили шишек на совместимости разных шин и протоколов и могут дать ценный совет, избегая типовых ошибок.
Поэтому сейчас, прежде чем начинать новый проект, я всегда анализирую: а есть ли на рынке компании-партнеры, которые уже решали похожие задачи? Возможно, их готовый или кастомизируемый продукт на основе какого-то конкретного ведущего микроконтроллера обойдется в итоге дешевле и будет надежнее, чем наша собственная разработка с нуля. Особенно это касается нишевых или специфичных применений.
Взгляд в будущее: что меняется в парадигме выбора?
Тренды очевидны: растущие требования к безопасности (functional safety, стандарты типа IEC 61508), необходимость поддержки промышленного IoT (встроенный стек защищенных протоколов, аппаратное шифрование), а также запрос на более простую и быструю разработку (low-code платформы, автоматическая генерация кода из моделей). Все это накладывает отпечаток на то, каким должен быть современный ведущий микроконтроллер.
Уже недостаточно иметь просто набор периферии. Нужны встроенные механизмы изоляции и контроля (Memory Protection Unit, watchdog таймеры с отдельным тактированием), поддержка TrustZone для Cortex-M, аппаратные ускорители криптографии. Также становится важной возможность беспроводного обновления прошивки (OTA) по надежному каналу. Микроконтроллер постепенно перестает быть просто вычислительным ядром, а становится платформой для безопасного и подключенного устройства.
С другой стороны, растет и сегмент специализированных решений. Например, микроконтроллеры, оптимизированные под управление бессенсорными двигателями (BLDC/PMSM) с продвинутыми алгоритмами FOC, или чипы с аналоговым фронтендом высокого разрешения для прямого подключения датчиков. Здесь ?ведущая? роль определяется не универсальностью, а именно глубиной оптимизации под конкретный класс задач. Возможно, будущее — за более модульным подходом, где на одной плате соседствуют несколько ?ведущих? специализированных контроллеров, а не один универсальный ?генералист?.
В итоге, возвращаясь к началу. Выбор ведущего микроконтроллера — это всегда компромисс и прогноз. Компромисс между мощностью, стоимостью, временем разработки и долгосрочной поддержкой. И прогноз на то, как будет эволюционировать проект и экосистема вокруг выбранной платформы. Самый дорогой урок, который можно извлечь — это то, что правильный выбор редко лежит на поверхности спецификаций. Он рождается из опыта, в том числе горького, и понимания реальных, а не гипотетических, условий работы будущего устройства. И в этом процессе диалог с практикующими интеграторами, такими как упомянутая компания, может быть не менее важен, чем изучение даташитов.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Серия SIPFC-CB-0026X — двухканальный модуль приёмо-передающего преобразования частоты
Серия SIPFC-CB-0026X — двухканальный модуль приёмо-передающего преобразования частоты -
 STD3256M16
STD3256M16 -
 Интегральный широкополосный усилитель HE380
Интегральный широкополосный усилитель HE380 -
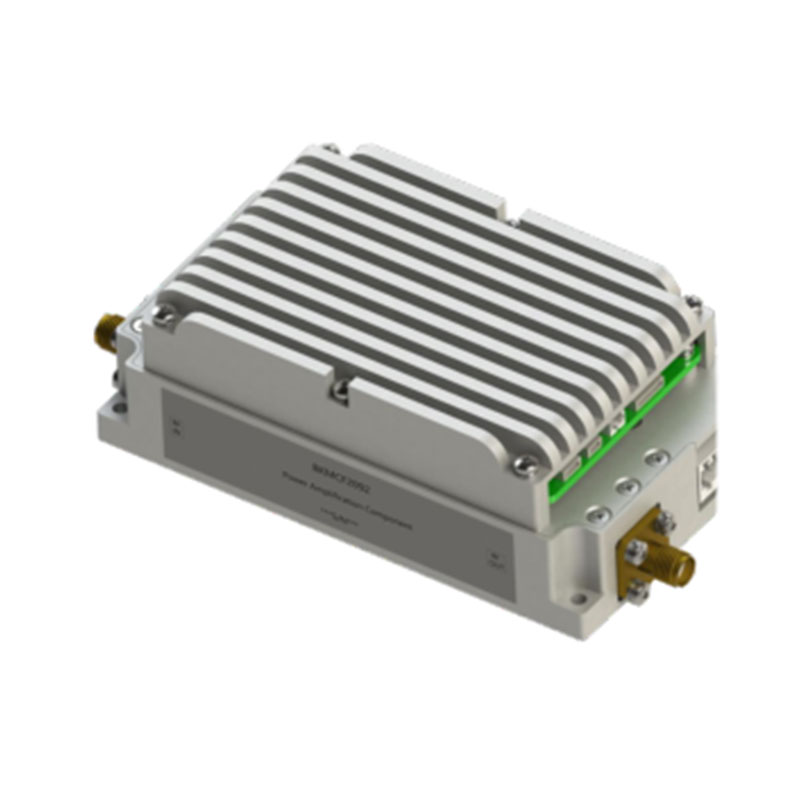
 Модуль усилителя мощности (широкополосный)
Модуль усилителя мощности (широкополосный) -
 Система на кристалле (SoC) Loongson 2P0300
Система на кристалле (SoC) Loongson 2P0300 -
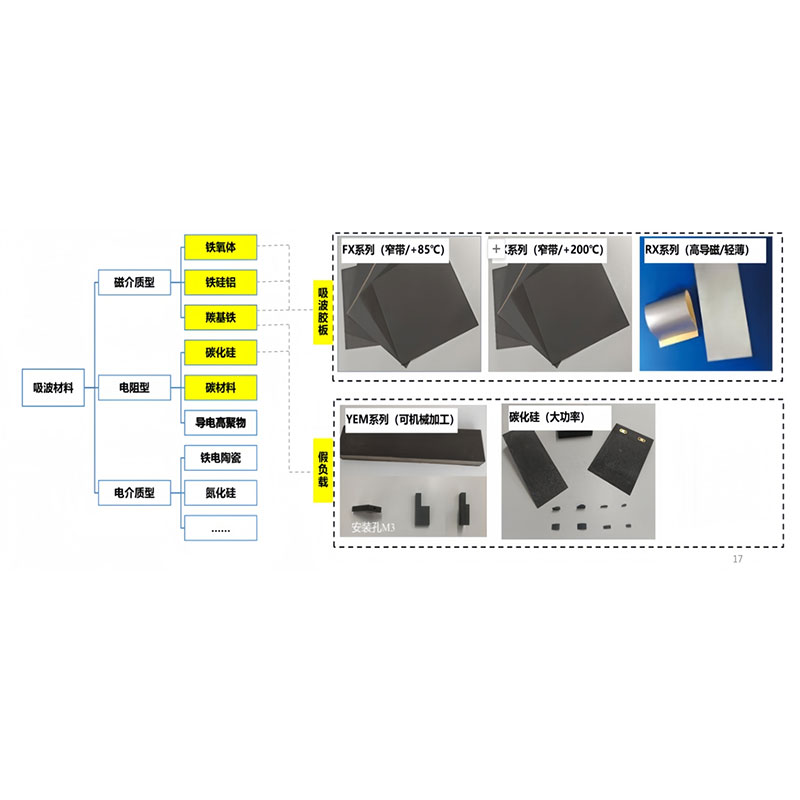 Радиопоглощающий материал
Радиопоглощающий материал -
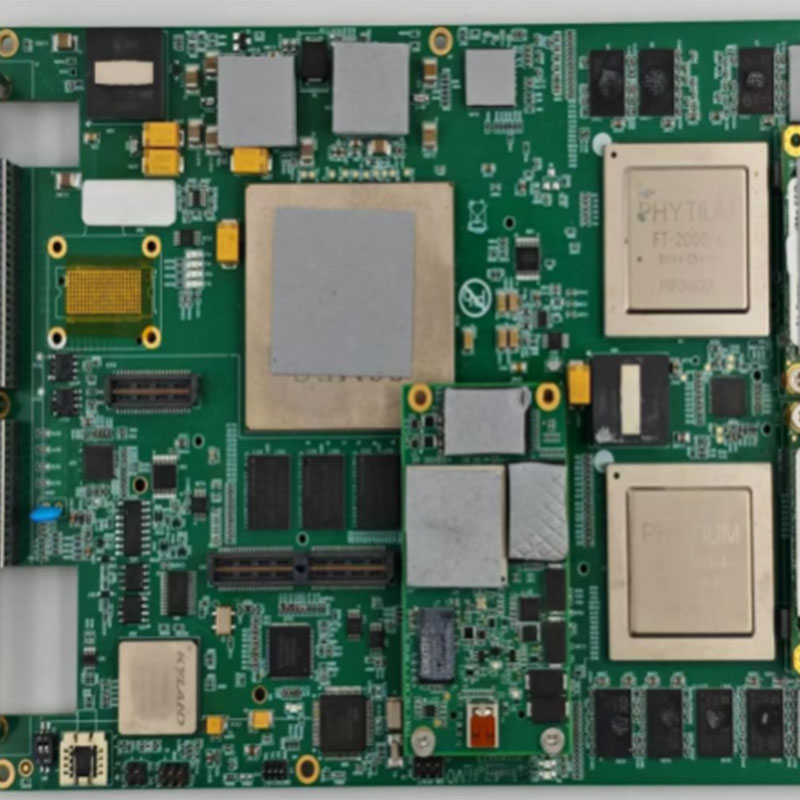 Многоканальный вычислительный модуль LRM
Многоканальный вычислительный модуль LRM -
 Модуль TR X-диапазона, 16 лучей
Модуль TR X-диапазона, 16 лучей -
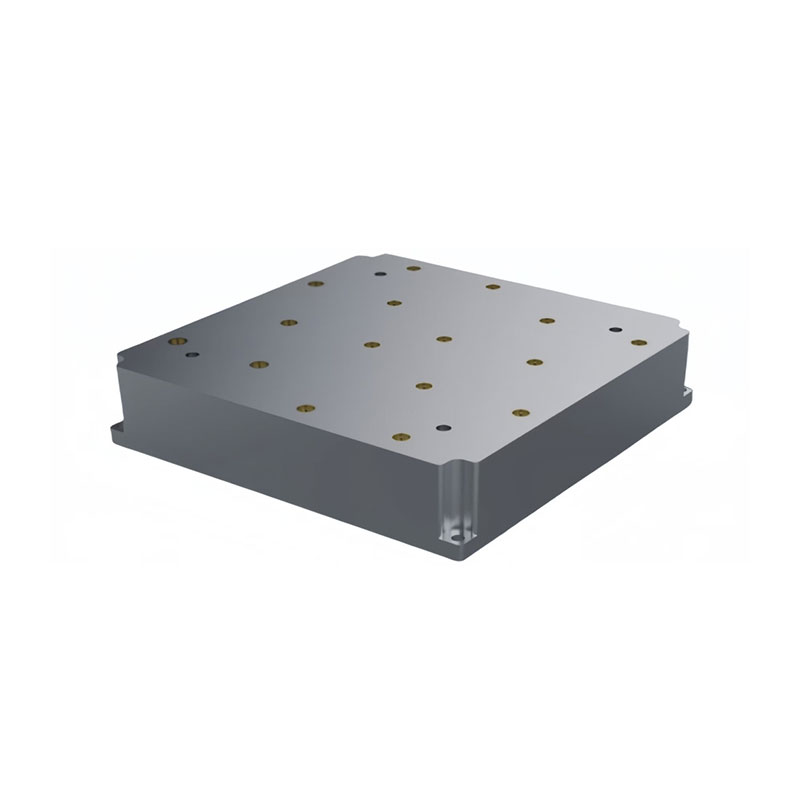
 XZPM4644M
XZPM4644M -
 Компонент передачи сигнала
Компонент передачи сигнала -
 YXW9009
YXW9009 -
 Микроконтроллер Loongson 1D100
Микроконтроллер Loongson 1D100
Связанный поиск
Связанный поиск- Китай электронный преобразователь тока поставщики
- Высококачественный микросхема операционные усилители
- Китай размер корпуса производители
- плата микроконтроллера
- Китай электронные измерительные преобразователи поставщики
- Китай плис (программируемая логическая интегральная схема)
- Китай электронные интегральные схемы поставщик
- элементная база интегральные схемы поколение
- Ведущий интегральные схемы эвм производители
- Китай интегральные операционные усилители производители



